Andere Peripheriegeräte für die Palettierung
Datenbezug für die Eingabeanforderungen
| 1 Tabelle 1 |
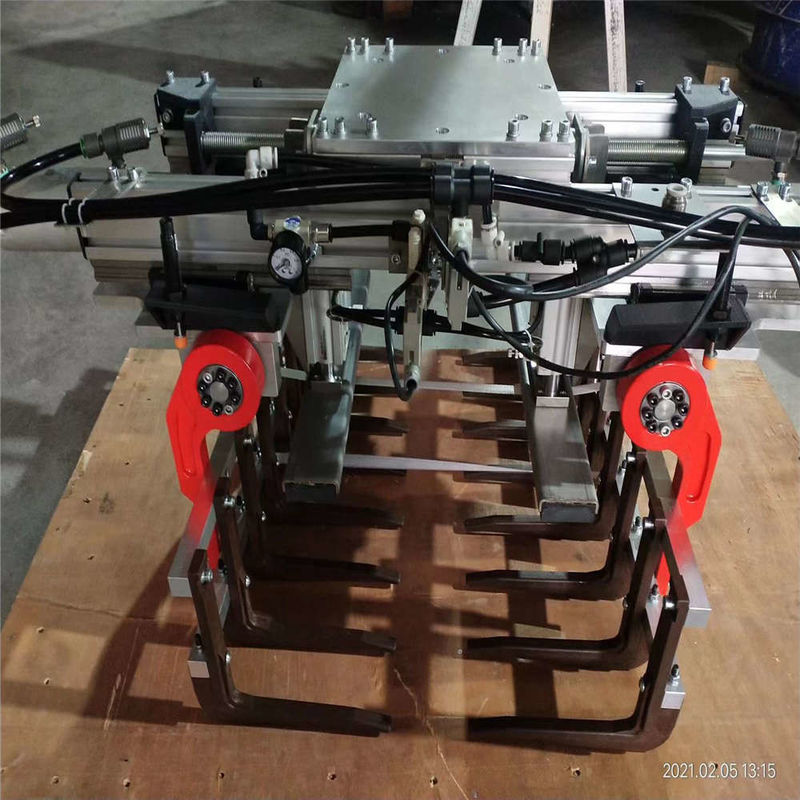
| Typ der Aufnahme |
Tasche |
| Gewicht und Größe |
50KG:L1050mm*W550mm*H250mm |
| Palletisierungsgeschwindigkeit (Tasche/Stunde) |
450 Säcke/Stunde |
| Palettenformat |
1 Fang und 1 Freisetzung einmal |
| Greiferform |
Zahnhalter |
| Hauptmaterial |
Aluminiumlegierung und Kohlenstoffstahl |
| Hauptkomponenten der Luftfahrt |
SMC |
| Zahnmaterial |
Runde Stange |
| Abstand zwischen den Griffzähnen |
80 mm |
| Größe des Greifers (Referenzwert) |
L1057mm*W908mm*H470mm |
| Gewicht der Greifmaschine (Kg) |
40 kg |
| Robotermarke |
EFORT |
| Roboterbelastung (KG) |
ER130-4-2800 |
| |
|
| 2 Tabelle 2 |
| Typ der Aufnahme |
Karton |
| Gewicht und Größe |
15KG:L300mm*W200mm*H200mm |
| Palletisierungsgeschwindigkeit (Tasche/Stunde) |
450 Schachteln/h |
| Palettenformat |
1 Fang und 1 Freisetzung einmal |
| Greiferform |
Plattenhalter |
| Hauptmaterial |
Aluminiumlegierung und Kohlenstoffstahl |
| Hauptkomponenten der Luftfahrt |
SMC |
| Größe des Greifers (Referenzwert) |
L800mm*W180mm*H400mm |
| Gewicht der Greifmaschine (Kg) |
40 kg |
| Robotermarke |
EFORT |
| Roboterbelastung (KG) |
ER180-4-3200 |
| |
|
Anmerkung: Es wird empfohlen, einen Verbundgriff zu machen und einen Vakuumsatz hinzuzufügen.
Auch wenn die Dicke des Sperrholzes, das zwischen den Boxen und den
Die Palettenlager sind sehr vielfältig und können nicht zwischen jeder Paletten und PalettenSchicht garantiert werden.
Die Lücke ist die gleiche, so dass sie nur als Greifer in Form einer Schiene hergestellt wird, die möglicherweise nicht in der Lage ist, jede Box auf dem
Es ist auch zu beachten, daß die Maschine keinen Sicherheitsschutz beim Gehen bietet und
Wenn es sich um einen Zusammensetzungstyp handelt, ist es nur notwendig, die Saugtasse auszudehnen und die Box aufzuziehen.
Die Box wird auf eine bestimmte Höhe angesaugt, die Saugtasse wird zurückgezogen und dann wird die Schiene an den Karton geklemmt.
Die Kompositionsgreifer wiegen ca. 65 kg, und die
Der Preis beträgt 7000 $ FOB Shanghai. |
Benutzeranleitung:
Gebrauchsanleitung
1Die entsprechenden Installations- und Debugging-Mitarbeiter müssen aufgefordert werden, das Gerät zu entpacken und zu demontieren.
2Die Installationsschritte sind wie folgt:
1) Installieren Sie den Greifer auf der Maschine nach der Programmierrichtung der Maschine
2) Dann installieren Sie den Griff auf die Maschine und befestigen Sie ihn fest
3) Verbinden Sie die Luftröhre und den Kreislauf nach Bedarf
4) Nach Beendigung der Installation ist der Greifer nach dem Einschalten mit der Lehrbox zu aktivieren.Sonst gehen die Konsequenzen auf eigene Gefahr.) Der Greifer darf ohne Grund nicht geöffnet und geschlossen werden.
5) Nach Abschluß des Unterrichts der Lehrbox wird der Verknüpfungstest durchgeführt, und schließlich geht sie in den normalen Betrieb.
6) Wenn Sie die Breite des Greifers anpassen möchten, müssen Sie zuerst die entsprechenden Schrauben oder Muttern lösen und dann die Schraube drehen, um die Breite des Greifers anzupassen
7) Die Form des Futtermaterials in der Fütterung muss gerade gehalten werden, sonst trifft der Greifer auf das zu greifende Objekt und der Wirt kann in schweren Fällen beschädigt werden.
Verfahren zur Inbetriebnahme
码?? 抓手调试 步骤 码?? 抓手 调试 步骤
Schritte zur Debugging von Palettiergreifern
1.抓手在安装于机器人臂后,找准在待码机的中心位置,然后找准零点位置 ((不宜过深).Nachdem der Greifer auf dem Roboterarm installiert ist, lokalisieren Sie die mittlere Position der Standby-Maschine und lokalisieren Sie dann die Nullposition (nicht zu tief).
2. nach dem Aufschluss der Nullposition manuell den Griff öffnen, um zu prüfen, ob der Griff beim Öffnen mit der Umgebung in Berührung kommt.und prüfen, ob die Griffzähne während des Öffnungsvorgangs die umliegenden Gegenstände berühren- Machen Sie die entsprechenden Anpassungen.
3. wird der Greifer auf null gestellt, das Vorfeld des Transporterplattes angepasst, so dass das Zentrum des Pakets auf dem Transporter mit dem Zentrum des Greifers in Einklang gebracht werden muss.Haltet den Greifer in der Null-Position und stellen Sie die Baffle des vorderen Förderers, so dass die Mitte des Buns auf dem Förderer muss mit der Mitte des Greifers konsistent sein.
4. streng überprüfen die tatsächliche Packung transportiert in die Wartemaschine nach der Position. Garantie mit dem Ergebnis des dritten Artikel übereinstimmen, alle Schrauben des ′′Platzes zu sperren. halten nicht leicht veränderbar. Streng überprüfen Sie die Position der tatsächlichen Brötchen, nachdem sie in die Wartemaschine transportiert werden. um die gleichen Ergebnisse wie in Punkt 3 sicherzustellen,Schrauben Sie alle Schrauben der LünetteEs kann nicht leicht geändert werden.
5.按3,4条调整完后,用校示盒手动校准各个位置 Nach der Einstellung nach den Punkten 3 und 4 verwenden Sie die Kalibrierbox, um jede Position manuell zu kalibrieren
6. in der tatsächlichen Fangpackung vorher alle Abmessungen der Flaschen überprüfen, im Einklang mit den Vertragsanforderungen, dann in manueller Form versuchen Fangpackung, Fangpackung aufnehmen, nachdem überprüfen Fanghand hat oder nicht Fangpackung.Versuche, die Brötchen manuell zu greifen.Nach dem Aufheben der Brötchen überprüfen Sie, ob der Greifer die Brötchen ergriffen hat.
7. die oben genannten Schritte abschließen, mit 10% Geschwindigkeit einen vollständigen Stapel durchlaufen, fehlerfrei überprüfen, dann mit 20% Geschwindigkeit in den tatsächlichen Griff gelangen, und dann schrittweise die Geschwindigkeit erhöhen, bis die geeignete Geschwindigkeit erreicht ist. Nach Abschluss der oben genannten Schritte bei 10% Leerlaufgeschwindigkeit für eine vollständige Palette, nach Überprüfung, dass sie korrekt ist,Eintritt in den tatsächlichen Griff bei 20% Geschwindigkeit, und dann die Geschwindigkeit allmählich erhöhen, bis sie eine geeignete Geschwindigkeit erreicht.
8. schließlich überprüfen, ob die Luftröhre und das Steuerungskabel gut am Griff befestigt sind. Vermeiden Sie, dass die Luftröhre und das Steuerungskabel während des Betriebs beschädigt werden. Schließlich überprüfen Sie, ob die Luftröhre und das Steuerungskabel gut am Greifer befestigt sind. Vermeiden Sie, dass die Luftröhre und die Steuerungskabel während des Betriebs abgeworfen werden.
9Überprüfen Sie, ob das plötzliche Abschaltgerät installiert ist. Die oben genannten Schritte sind vollständig und können normal funktionieren.
Referenzfall
Verpackungsinformationen.

Benutzerdefinierte Anforderungen sind sehr willkommen

 Ihre Nachricht muss zwischen 20 und 3.000 Zeichen enthalten!
Ihre Nachricht muss zwischen 20 und 3.000 Zeichen enthalten!